- 3D 物体识别
- O3R机器人平台
自动化程度极高的汽车行业
自动驾驶汽车(AV)行业正在追求5级自主性等级,实现无需驾驶员干预的完全自动化,让普通消费者也能购买自动驾驶汽车。
- 制造商认为只有配备能让车辆更好地感知其环境的感知模块才能达到5级自主性等级
- 使用多模态方法来感知车辆周围环境
- 每种模态专为克服其他模态的“弱点”而设计,从而能构建坚固可靠的平台,实现卓越的环境意识
移动机器人面临的挑战
自主性对于移动机器人而言并不新鲜(该概念早在1950年代就已提出)。
- 与自动驾驶汽车行业不同,成本因素是移动机器人提高自主性的主要障碍
- 移动机器人的切入点需要客户的大量投资,并会推迟实现投资回报的时间
- 在硬件选择方面,制造商将不得不做出妥协:为了降低材料成本,他们只能重点关注安全
- 最终,这会限制机器人的整体灵活性,并反过来降低其能力
那么如果无需妥协呢?
借鉴自动驾驶汽车行业的经验
自动驾驶汽车行业在实现5级自主性等级的方法上并没有问题。更好的环境意识有助于改善自动驾驶汽车的灵活性和整体使用。移动机器人行业同样具备这种能力。
为了实现这一点,必须缓解多模态多摄像头应用的挑战,包括传感器同步和融合。降低感知平台总拥有成本的唯一方法是简化设计并集成多模态系统。
O3R感知平台专为完成这一任务而设计。
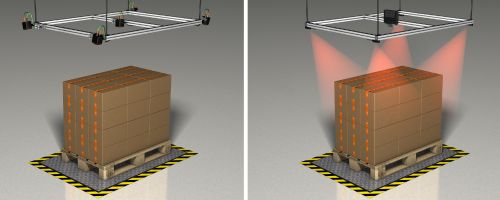
O3R平台是一种综合性解决方案,可实现对AGV等自主移动机器人的图像和传感器信息进行集中的同步处理。它能实现摄像头和传感器的简单集成和可靠互动,从而可靠实施防碰撞、导航和定位等相关功能。此外,其还可实施静止物体的分析和尺寸测量,并通过多摄像头进行更高效的处理。其应用包括托盘、原木、包裹和手提箱的测量。
采用内部研发成像仪的摄像头

ifm为该感知平台解决方案提供了合适的高性能摄像头:这些2D/3D摄像头可选60°或105°孔径角,并配备了pmd的光飞行时间成像仪。pmd是自动化专家ifm集团旗下的子公司,开发所有面向ifm视觉产品的传感器,并且这些传感器可以根据相关要求进行精确调整。凭借调制红外光,这些2D/3D摄像头即使在暴露于环境光时也能非常可靠地检测物体。
强大且开放:用于传感信息处理的中央设备

系统的核心是被称为视频处理单元(VPU)的强大计算单元。它基于Yocto Linux和NVIDIA Jetson TX2,并支持ROS和Docker等开放式开发环境。最多可将6个摄像头连接到该计算单元。通过千兆以太网接口,还可连接其他传感器,例如用于检测门和分隔墙等玻璃表面的超声波传感器等。因此,它能集中提供AGV进行安全自主导航所需的所有“感官”。
O3R软件架构可通过丰富的软件工具和众多接口促进预开发和系列开发。通过使用Docker架构,可以为Python、ROS、CUDA和C++等开放式开发环境提供支持。
| Linux是机器人领域最常用的操作系统。辅助设备必须使用相同的语言。 | |
| 容器保证了开发人员在编程语言和环境方面的全面灵活性。当使用熟悉的软件环境时,可以减少开发时间。 | |
 |
ROS是一种开发过程中常用的中间件。ROS2可为从开发转向部署提供潜能。 |
| CUDA和Jetpack等强大工具可以完全部署在基于NIVIDIA的VPU上。 |